The framework offers a library of vector spaces with visual representations to guide the analysis and synthesis of flexible systems.
The FACT design approach was created in 2005 by Jonathan Brigham Hopkins while a Master’s student in Professor Martin L. Culpepper’s Precision Compliant Systems Laboratory at MIT.
FACT combines principles of screw theory, linear algebra, projective geometry, and exact-constraint design.
The methodology employs a library of vector spaces derived from these principles and represented by geometric shapes.
The FACT library allows traversal of the complete solution space of flexible systems for any combination of degrees of freedom.
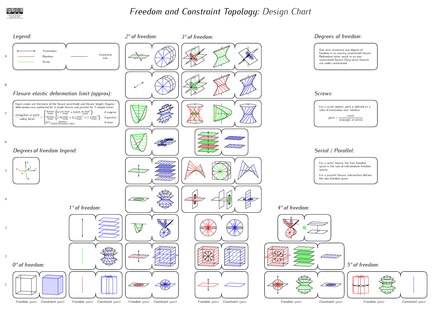
FACT library of freedom and constraint spaces used to design parallel flexure systems
Fig 1: A set of four degrees of freedom (three intersecting and orthogonal red rotation lines and one black translation arrow)
Fig 2: The complementary freedom (red) and constraint (blue) spaces for the degrees of freedom shown in Fig 1 (4 DOF column, type 1 in the FACT library)
Fig 3: Selecting wire flexure elements from within the example's constraint space such that the resulting topology is exactly-constrained
Fig 4: Two parallel flexure systems with identical topology but different rigid body geometries. They each achieve the DOFs from Fig 1
Recreation of FACT library of freedom and constraint spaces used to design parallel flexure systems, in PDF with additional information added