Instant centre of rotation
The instant center of rotation (also known as instantaneous velocity center,[1] instantaneous center, or pole of planar displacement) of a body undergoing planar movement is a point that has zero velocity at a particular instant of time.
At this instant, the velocity vectors of the other points in the body generate a circular field around this center of rotation which is identical to what is generated by a pure rotation.
The continuous movement of a plane has an instant center for every value of the time parameter.
The instant center can be considered the limiting case of the pole of a planar displacement.
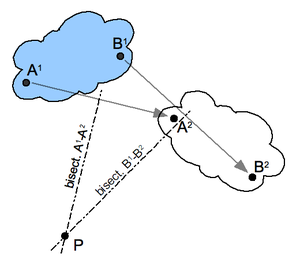
Construction for the pole of a planar displacement First, select two points A and B in the moving body and locate the corresponding points in the two positions; see the illustration.
Notice that A1 and A2 lie on a circle around P. This is true for the corresponding positions of every point in the body.
In this case, the segments constructed between the instantaneous positions of the points A and B become the velocity vectors VA and VB.
The lines perpendicular to these velocity vectors intersect in the instant center.
):Rewrite this as a 4 × 4 inhomogeneous system of linear equations with 4 unknowns (the two distances
of the center): The coordinates of the center of the rotation are the first two components of the solution vector Find equations of the bisectors of two segments A1A2 and B1B2 as follows The equation of a straight line in point- slope form is:
These lines are considered to intersect at a point on the line at infinity, thus the pole of this planar displacement is said to "lie at infinity" in the direction of the perpendicular bisectors.
In the limit, pure translation becomes planar movement with point velocity vectors that are parallel.
In this case, the instant center is said to lie at infinity in the direction perpendicular to the velocity vectors.
Consider the planar movement of a circular wheel rolling without slipping on a linear road; see sketch 3.
The wheel rotates around its axis M, which translates in a direction parallel to the road.
The further a point in the wheel is from the instant center P, the proportionally larger its speed.
This is shown for a point on the wheel that has the same speed as M but moves in the direction tangent to the circle around P. If two planar rigid bodies are in contact, and each body has its own distinct center of rotation, then the relative center of rotation between the bodies has to lie somewhere on the line connecting the two centers.
As a result, since pure rolling can only exist when the center of rotation is at the point of contact (as seen above with the wheel on the road), it is only when the point of contact goes through the line connecting the two rotation centers that pure rolling can be achieved.
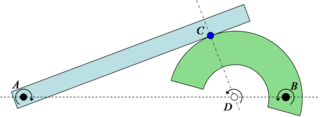
Sketch 1 above shows a four-bar linkage where a number of instant centers of rotation are illustrated.
The rigid body noted by the letters BAC is connected with links P1-A and P2-B to a base or frame.
Since P1 is the only point not moving in the given plane it may be called the instant center of rotation for this link.
Point A, at distance P1-A from P1, moves in a circular motion in a direction perpendicular to the link P1-A, as indicated by vector VA.
For determining the instant center of rotation of the third element of the linkage, the body BAC, the two points A and B are used because its moving characteristics are known, as derived from the information about the links P1-A and P2-B.
The direction of speed of point A is indicated by vector VA. Its instant center of rotation must be perpendicular to this vector (as VA is tangentially located on the circumference of a circle).
Somewhere on this line there is a point P, the instant center of rotation for the body BAC.
What applies to point A also applies to point B, therefore this instant center of rotation P is located on a line perpendicular to vector VB, a line colinear with link P2-B.
Therefore, the instant center of rotation P of body BAC is the point where the lines through P1-A and P2-B cross.
From this the path of movement for C or any other point on body BAC may be determined.
In biomechanical research the instant center of rotation is observed for the functioning of the joints in the upper and lower extremities.
This construction is used to establish the kinematic roll center of the suspension.