Slerp
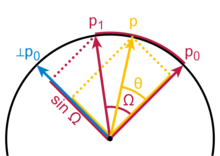
It refers to constant-speed motion along a unit-radius great circle arc, given the ends and an interpolation parameter between 0 and 1.
This formula, a symmetric weighted sum credited to Glenn Davis, is based on the fact that any point on the curve must be a linear combination of the ends.
When a circular arc is to be drawn into a raster image, the preferred method is some variation of Bresenham's circle algorithm.
Another special case, common in animation, is evaluation with fixed ends and equal parametric steps.
Slerp gives a straightest and shortest path between its quaternion end points, and maps to a rotation through an angle of 2Ω.
The derivative of slerp(q0, q1; t) with respect to t, assuming the ends are fixed, is log(q1q0−1) times the function value, where the quaternion natural logarithm in this case yields half the 3D angular velocity vector.