Covering space
In topology, a covering or covering projection is a map between topological spaces that, intuitively, locally acts like a projection of multiple copies of a space onto itself.
Covering spaces first arose in the context of complex analysis (specifically, the technique of analytic continuation), where they were introduced by Riemann as domains on which naturally multivalued complex functions become single-valued.
[1]: 10 Covering spaces are an important tool in several areas of mathematics.
In modern geometry, covering spaces (or branched coverings, which have slightly weaker conditions) are used in the construction of manifolds, orbifolds, and the morphisms between them.
In algebraic topology, covering spaces are closely related to the fundamental group: for one, since all coverings have the homotopy lifting property, covering spaces are an important tool in the calculation of homotopy groups.
A standard example in this vein is the calculation of the fundamental group of the circle by means of the covering of
[2]: 29 Under certain conditions, covering spaces also exhibit a Galois correspondence with the subgroups of the fundamental group.
are called sheets, which are uniquely determined up to homeomorphism if
of the unit circle is an infinite cyclic group, which is generated by the homotopy classes of the loop
a connected covering, then the induced group homomorphism is injective and the subgroup
be Riemann surfaces, i.e. one dimensional complex manifolds, and let
is a non-constant, holomorphic map between compact Riemann surfaces, then
be a non-constant, holomorphic map between compact Riemann surfaces.
be a non-constant, holomorphic map between compact Riemann surfaces.
is called a branched covering, if there exists a closed set with dense complement
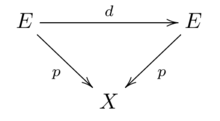
is another simply connected covering, then there exists a uniquely determined homeomorphism
The following theorem guarantees its existence for a certain class of base spaces.
Let G be a discrete group acting on the topological space X.
It is natural to ask under what conditions the projection from X to the orbit space X/G is a covering map.
The theory for this is set down in Chapter 11 of the book Topology and groupoids referred to below.
The main result is that for discontinuous actions of a group G on a Hausdorff space X which admits a universal cover, then the fundamental groupoid of the orbit space X/G is isomorphic to the orbit groupoid of the fundamental groupoid of X, i.e. the quotient of that groupoid by the action of the group G. This leads to explicit computations, for example of the fundamental group of the symmetric square of a space.
is called a smooth covering if it is a smooth map and the sheets are mapped diffeomorphically onto the corresponding open subset of M. (This is in contrast to the definition of a covering, which merely requires that the sheets are mapped homeomorphically onto the corresponding open subset.)
Together with the composition of maps, the set of deck transformation forms a group
[2]: 70 Because of this property every deck transformation defines a group action on
be a group, which acts discontinuously on a topological space
[2]: 68–70 An important practical application of covering spaces occurs in charts on SO(3), the rotation group.
Topologically, SO(3) is the real projective space RP3, with fundamental group Z/2, and only (non-trivial) covering space the hypersphere S3, which is the group Spin(3), and represented by the unit quaternions.
However, it is often desirable to represent rotations by a set of three numbers, known as Euler angles (in numerous variants), both because this is conceptually simpler for someone familiar with planar rotation, and because one can build a combination of three gimbals to produce rotations in three dimensions.
Specifically, the failure of the map to be a local homeomorphism at certain points is referred to as gimbal lock, and is demonstrated in the animation at the right – at some points (when the axes are coplanar) the rank of the map is 2, rather than 3, meaning that only 2 dimensions of rotations can be realized from that point by changing the angles.
This causes problems in applications, and is formalized by the notion of a covering space.


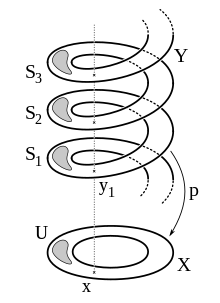
![{\displaystyle Y=[0,1]\times \mathbb {R} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/b566709fb62d0c99d75506726ea4f22fc3f98078)
![{\displaystyle X=[0,1]\times S^{1}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3ecfebcfe87fcb8d16f87d9f6dfecca71bf16af1)