Method of averaging
In mathematics, more specifically in dynamical systems, the method of averaging (also called averaging theory) exploits systems containing time-scales separation: a fast oscillation versus a slow drift.
It suggests that we perform an averaging over a given amount of time in order to iron out the fast oscillations and observe the qualitative behavior from the resulting dynamics.
It turns out to be a customary problem where there exists the trade off between how good is the approximated solution balanced by how much time it holds to be close to the original solution.
The averaging method yields an autonomous dynamical system
inside a connected and compact region of the phase space and over time of
Under the validity of this averaging technique, the asymptotic behavior of the original system is captured by the dynamical equation for
In this way, qualitative methods for autonomous dynamical systems may be employed to analyze the equilibria and more complex structures, such as slow manifold and invariant manifolds, as well as their stability in the phase space of the averaged system.
In addition, in a physical application it might be reasonable or natural to replace a mathematical model, which is given in the form of the differential equation for
[1] The averaging method has a long history, which is deeply rooted in perturbation problems that arose in celestial mechanics (see, for example in [2]).
We expand this time-dependent vector field in a Taylor series (in powers of
Besides, we define the following initial value problem to be in the standard form:[2]
Krylov-Bogoliubov realized that the slow dynamics of the system determines the leading order of the asymptotic solution.
Along the history of the averaging technique, there is class of system extensively studied which give us meaningful examples we will discuss below.
Hence there is a necessity to perform a transformation to make it in the standard form explicitly.
If we take the time derivative in both sides and invert the fundamental matrix we obtain
we may apply averaging so long as a neighborhood of the origin is excluded (since the polar coordinates fail):
These limitations play important role when we average the original equation which is not into the standard form, and we can discuss counterexample of it.
The following example in order to discourage this hurried averaging:[2]
The averaged system obtained from the standard form yields:
which in the rectangular coordinate shows explicitly that indeed the rate of convergence to the origin is
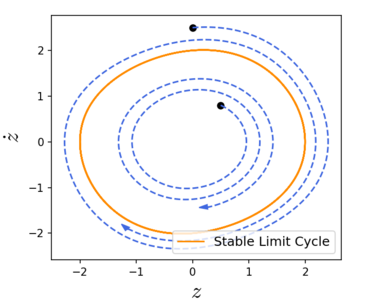
Van der Pol was concerned with obtaining approximate solutions for equations of the type
This system is often called the Van der Pol oscillator.
Applying periodic averaging to this nonlinear oscillator provides qualitative knowledge of the phase space without solving the system explicitly.
There is an unstable fixed point at the origin and a stable limit cycle represented by
The proof can be found at Guckenheimer and Holmes,[5] Sanders et al. [2] and for the angle case in Chicone.
[1] The average theorem assumes existence of a connected and bounded region
Consider a damped pendulum whose point of suspension is vibrated vertically by a small amplitude, high frequency signal (this is usually known as dithering).
The pendulum's trajectory in phase space will trace out a spiral around a curve
Average technique for initial value problems has been treated up to now with an validity error estimates of order
[2] Below we deal with a system containing an asymptotically stable fixed point.