Minor loop feedback
[1] The method is sometimes called minor loop synthesis in college textbooks,[1][2] some government documents.
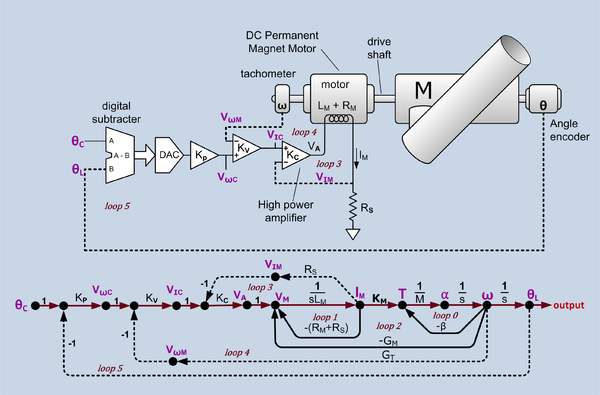
[5] This example is slightly simplified (no gears between the motor and the load) from the control system for the Harlan J. Smith Telescope at the McDonald Observatory.
The motor inductance and winding resistance form a low-pass filter with a bandwidth around 200 Hz.
This type of motor creates torque that is nearly proportional to the rotor current, even if it is forced to turn backward.
The voltage signal from the Tachometer (a small permanent magnet DC generator) is proportional to the angular velocity of the motor.
Position control allows the servo to compensate for sag and for slight position ripple caused by gears (not shown) between the motor and the telescope The usual design procedure is to design the innermost subsystem (the current control loop in the telescope example) using local feedback to linearize and flatten the gain.
The system is often expressed as a Signal-flow graph and its overall transfer function can be computed from Mason's Gain Formula.