Nonlinear programming
In mathematics, nonlinear programming (NLP) is the process of solving an optimization problem where some of the constraints are not linear equalities or the objective function is not a linear function.
An optimization problem is one of calculation of the extrema (maxima, minima or stationary points) of an objective function over a set of unknown real variables and conditional to the satisfaction of a system of equalities and inequalities, collectively termed constraints.
It is the sub-field of mathematical optimization that deals with problems that are not linear.
In some cases, infeasible problems are handled by minimizing a sum of feasibility violations.
Some special cases of nonlinear programming have specialized solution methods: A typical non-convex problem is that of optimizing transportation costs by selection from a set of transportation methods, one or more of which exhibit economies of scale, with various connectivities and capacity constraints.
An example would be petroleum product transport given a selection or combination of pipeline, rail tanker, road tanker, river barge, or coastal tankship.
Owing to economic batch size the cost functions may have discontinuities in addition to smooth changes.
In experimental science, some simple data analysis (such as fitting a spectrum with a sum of peaks of known location and shape but unknown magnitude) can be done with linear methods, but in general these problems are also nonlinear.
Typically, one has a theoretical model of the system under study with variable parameters in it and a model the experiment or experiments, which may also have unknown parameters.
In this case one often wants a measure of the precision of the result, as well as the best fit itself.
If some of the functions are non-differentiable, subdifferential versions of Karush–Kuhn–Tucker (KKT) conditions are available.
[1] Under convexity, the KKT conditions are sufficient for a global optimum.
Without convexity, these conditions are sufficient only for a local optimum.
There are three kinds of update rules:[2]: 5.1.2 Third-order routines (and higher) are theoretically possible, but not used in practice, due to the higher computational load and little theoretical benefit.
Another method involves the use of branch and bound techniques, where the program is divided into subclasses to be solved with convex (minimization problem) or linear approximations that form a lower bound on the overall cost within the subdivision.
With subsequent divisions, at some point an actual solution will be obtained whose cost is equal to the best lower bound obtained for any of the approximate solutions.
The algorithm may also be stopped early, with the assurance that the best possible solution is within a tolerance from the best point found; such points are called ε-optimal.
This is especially useful for large, difficult problems and problems with uncertain costs or values where the uncertainty can be estimated with an appropriate reliability estimation.
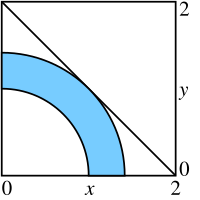
There exist numerous nonlinear programming solvers, including open source: A simple problem (shown in the diagram) can be defined by the constraints
Another simple problem (see diagram) can be defined by the constraints