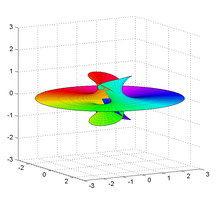
Richmond surface
In differential geometry, a Richmond surface is a minimal surface first described by Herbert William Richmond in 1904.
[1] It is a family of surfaces with one planar end and one Enneper surface-like self-intersecting end.
It has Weierstrass–Enneper parameterization
This allows a parametrization based on a complex parameter as The associate family of the surface is just the surface rotated around the z-axis.
Taking m = 2 a real parametric expression becomes:[2]