Simple machine
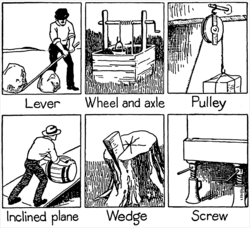
A simple machine is a mechanical device that changes the direction or magnitude of a force.
[2] Usually the term refers to the six classical simple machines that were defined by Renaissance scientists:[3][4][5] A simple machine uses a single applied force to do work against a single load force.
The machine can increase the amount of the output force, at the cost of a proportional decrease in the distance moved by the load.
The ratio of the output to the applied force is called the mechanical advantage.
Although they continue to be of great importance in mechanics and applied science, modern mechanics has moved beyond the view of the simple machines as the ultimate building blocks of which all machines are composed, which arose in the Renaissance as a neoclassical amplification of ancient Greek texts.
The great variety and sophistication of modern machine linkages, which arose during the Industrial Revolution, is inadequately described by these six simple categories.
[14] Archimedes' famous remark with regard to the lever: "Give me a place to stand on, and I will move the Earth," (Greek: δῶς μοι πᾶ στῶ καὶ τὰν γᾶν κινάσω)[15][16][17] expresses his realization that there was no limit to the amount of force amplification that could be achieved by using mechanical advantage.
Later Greek philosophers defined the classic five simple machines (excluding the inclined plane) and were able to calculate their (ideal) mechanical advantage.
[7] For example, Heron of Alexandria (c. 10–75 AD) in his work Mechanics lists five mechanisms that can "set a load in motion": lever, windlass, pulley, wedge, and screw,[13] and describes their fabrication and uses.
During the Renaissance the dynamics of the mechanical powers, as the simple machines were called, began to be studied from the standpoint of how far they could lift a load, in addition to the force they could apply, leading eventually to the new concept of mechanical work.
In 1586 Flemish engineer Simon Stevin derived the mechanical advantage of the inclined plane, and it was included with the other simple machines.
The complete dynamic theory of simple machines was worked out by Italian scientist Galileo Galilei in 1600 in Le Meccaniche (On Mechanics), in which he showed the underlying mathematical similarity of the machines as force amplifiers.
[19] The classic rules of sliding friction in machines were discovered by Leonardo da Vinci (1452–1519), but were unpublished and merely documented in his notebooks, and were based on pre-Newtonian science such as believing friction was an ethereal fluid.
They were rediscovered by Guillaume Amontons (1699) and were further developed by Charles-Augustin de Coulomb (1785).
Although each machine works differently mechanically, the way they function is similar mathematically.
Simple machines do not contain a source of energy,[24] so they cannot do more work than they receive from the input force.
All real machines have friction, which causes some of the input power to be dissipated as heat.
So in non-ideal machines, the mechanical advantage is always less than the velocity ratio by the product with the efficiency
For example, a bench vise consists of a lever (the vise's handle) in series with a screw, and a simple gear train consists of a number of gears (wheels and axles) connected in series.
[31] So these machines can be used in either direction, with the driving force applied to either input point.
The components of actuators and mechanisms consist of links and joints that form kinematic chains.
Simple machines are elementary examples of kinematic chains that are used to model mechanical systems ranging from the steam engine to robot manipulators.
The bearings that form the fulcrum of a lever and that allow the wheel and axle and pulleys to rotate are examples of a kinematic pair called a hinged joint.
Similarly, the flat surface of an inclined plane and wedge are examples of the kinematic pair called a sliding joint.
The screw is usually identified as its own kinematic pair called a helical joint.
However, a more successful strategy was identified by Franz Reuleaux, who collected and studied over 800 elementary machines.
He realized that a lever, pulley, and wheel and axle are in essence the same device: a body rotating about a hinge.
Similarly, an inclined plane, wedge, and screw are a block sliding on a flat surface.
[34] This realization shows that it is the joints, or the connections that provide movement, that are the primary elements of a machine.
[26] The design of mechanisms to perform required movement and force transmission is known as kinematic synthesis.