Contact mechanics
Current challenges faced in the field may include stress analysis of contact and coupling members and the influence of lubrication and material design on friction and wear.
Hertz attempted to understand how the optical properties of multiple, stacked lenses might change with the force holding them together.
It was not until nearly one hundred years later that Kenneth L. Johnson, Kevin Kendall, and Alan D. Roberts found a similar solution for the case of adhesive contact.
Further advancement in the field of contact mechanics in the mid-twentieth century may be attributed to names such as Frank Philip Bowden and Tabor.
Solutions for multitude of other technically relevant shapes, e.g. the truncated cone, the worn sphere, rough profiles, hollow cylinders, etc.
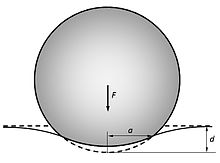
In this method, the initial three-dimensional system is replaced with a contact of a body with a linear elastic or viscoelastic foundation (see fig.).
To simplify the solution procedure, a frame of reference is usually defined in which the objects (possibly in motion relative to one another) are static.
A common approach in linear elasticity is to superpose a number of solutions each of which corresponds to a point load acting over the area of contact.
A starting point for solving contact problems is to understand the effect of a "point-load" applied to an isotropic, homogeneous, and linear elastic half-plane, shown in the figure to the right.
These methods do not rely on further assumptions within the solution process since they base solely on the general formulation of the underlying equations.
If the contacting bodies are approximated as linear elastic half spaces, the Boussinesq-Cerruti integral equation solution can be applied to express the deformation (
The strict LCP formulation of the CM problem presented above, allows for direct application of well-established numerical solution techniques such as Lemke's pivoting algorithm.
In addition, an example code for an LCP solution of a 2D linear elastic contact mechanics problem has also been made public at MATLAB file exchange by Almqvist et al.
It is recognized that the self affine structure of surfaces is the origin of the linear scaling of true contact area with applied pressure.
[37] Leighton et al.[38] presented fits for crosshatched IC engine cylinder liner surfaces together with a process for determining the
They are calculated for the Gaussian distribution of asperities, which have been shown to be unrealistic for engineering surface but can be assumed where friction, load carrying capacity or real contact area results are not critical to the analysis.
For the situation where the asperities on the two surfaces have a Gaussian height distribution and the peaks can be assumed to be spherical,[31] the average contact pressure is sufficient to cause yield when
The Greenwood-Williamson model requires knowledge of two statistically dependent quantities; the standard deviation of the surface roughness and the curvature of the asperity peaks.
represents the micro-roughness in a state of complete plasticity and only one statistical quantity, the rms slope, is needed which can be calculated from surface measurements.
They are calculated for the Gaussian distribution of asperities, which have been shown to be unrealistic for engineering surface but can be assumed where friction, load carrying capacity or real contact area results are not critical to the analysis.
When two solid surfaces are brought into close proximity, they experience attractive van der Waals forces.
R. S. Bradley's van der Waals model[41] provides a means of calculating the tensile force between two rigid spheres with perfectly smooth surfaces.
However, in the late 1960s, several contradictions were observed when the Hertz theory was compared with experiments involving contact between rubber and glass spheres.
The general solution for the pressure distribution in the contact area in the JKR model is Note that in the original Hertz theory, the term containing
A more efficient method of doing the calculations and additional results were given by Feng [46] Further improvement to the Tabor idea was provided by Maugis[9] who represented the surface force in terms of a Dugdale cohesive zone approximation such that the work of adhesion is given by where
is the maximum separation obtained by matching the areas under the Dugdale and Lennard-Jones curves (see adjacent figure).
is defined as In the Maugis–Dugdale theory,[47] the surface traction distribution is divided into two parts - one due to the Hertz contact pressure and the other from the Dugdale adhesive stress.
equals to the theoretical stress of the Lennard-Jones potential Zheng and Yu [48] suggested another value for the step cohesive stress to match the Lennard-Jones potential, which leads to Then the net contact force may be expressed as and the elastic compression as The equation for the cohesive gap between the two bodies takes the form This equation can be solved to obtain values of
The Carpick–Ogletree–Salmeron (COS) approximate solution[49] (after Robert Carpick, D. Frank Ogletree and Miquel Salmeron)simplifies the process by using the following relation to determine the contact radius
When a rigid punch with flat but oddly shaped face is carefully pulled off its soft counterpart, its detachment occurs not instantaneously but detachment fronts start at pointed corners and travel inwards, until the final configuration is reached which for macroscopically isotropic shapes is almost circular.