Hunting oscillation
[1] The expression is used to describe phenomena in such diverse fields as electronics, aviation, biology, and railway engineering.
Some trains, like the Talgo 350, have no differential, yet they are mostly not affected by hunting oscillation, as most of their wheels rotate independently from one another.
Advances in wheel and truck design based on research and development efforts in Europe and Japan have extended the speeds of steel wheel systems well beyond those attained by the original Shinkansen, while the advantage of backwards compatibility keeps such technology dominant over alternatives such as the hovertrain and maglev systems.
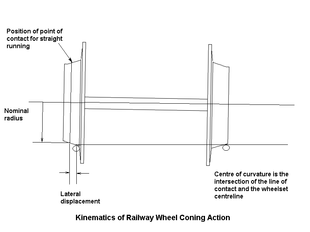
This is a trajectory on the plane of the level earth's surface and plotted on an x-y graphical plot where x is the distance along the railroad and y is the "tracking error", the deviation of the center of the wheelset from the straight line of the railway running down the center of the track (midway between the two rails).
To illustrate that a wheelset trajectory follows a curved path, one may place a nail or screw on a flat table top and give it a push.
It will roll in a circular curve because the nail or screw is like a wheelset with extremely different diameter wheels.
As the wheelset rolls on, the curvature decreases until the wheels reach the point where their effective diameters are equal and the path is no longer curving.
The angular velocity is the same for both wheels (they are coupled via a rigid axle), so the larger diameter tread speeds up, while the smaller slows down.
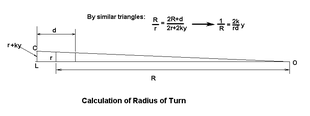
[3] Provided the direction of motion remains more or less parallel to the rails, the curvature of the path may be related to the second derivative of y with respect to distance along the track as approximately[4] It follows that the trajectory along the track is governed by the equation:[5] This is a simple harmonic motion having wavelength: This kinematic analysis implies that trains sway from side to side all the time.
These may be analyzed using the concept of creep (non-linear) but are somewhat difficult to quantify simply, as they arise from the elastic distortion of the wheel and rail at the regions of contact.
A complete analysis takes these forces into account, using rolling contact mechanics theories.
Now it is clear that there is some creep slippage which makes the calculated sinusoidal trajectory of the wheelset (per Klingel's formula) not exactly correct.
In order to get an estimate of the critical speed, we use the fact that the condition for which this kinematic solution is valid corresponds to the case where there is no net energy exchange with the surroundings, so by considering the kinetic and potential energy of the system, we should be able to derive the critical speed.
the displacement of the support point out from the centres of the treads is: the axle load falls by The work done by lowering the axle load is therefore: This is energy lost from the system, so in order for the motion to continue, an equal amount of energy must be extracted from the forward motion of the wheelset.
This result is derived in Wickens (1965)[9] from an analysis of the system dynamics using standard control engineering methods.
The main purpose of nonlinear analysis of rail vehicle system dynamics is to show the view of analytical investigation of bifurcation, nonlinear lateral stability and hunting behavior of rail vehicles in a tangent track.
[11] Two main matters, namely assuming the body as a fixed support and influence of the nonlinear elements in calculation of the hunting speed, are mostly focused in studies.
[12] A real railway vehicle has many more degrees of freedom and, consequently, may have more than one critical speed; it is by no means certain that the lowest is dictated by the wheelset motion.
Introducing elastic forces into the equation permits suspension designs which are limited only by the onset of gross slippage, rather than classical hunting.
The penalty to be paid for the virtual elimination of hunting is a straight track, with an attendant right-of-way problem and incompatibility with legacy infrastructure.
Hunting is a dynamic problem which can be solved, in principle at least, by active feedback control, which may be adapted to the quality of track.
Shortly after the onset of hunting, gross slippage occurs and the wheel flanges impact on the rails, potentially causing damage to both.