Solid angle
In geometry, a solid angle (symbol: Ω) is a measure of the amount of the field of view from some particular point that a given object covers.
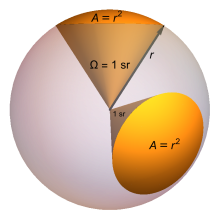
In the International System of Units (SI), a solid angle is expressed in a dimensionless unit called a steradian (symbol: sr), which is equal to one square radian, sr = rad2.
Indeed, as viewed from any point on Earth, both objects have approximately the same solid angle (and therefore apparent size).
Just as the magnitude of a plane angle in radians at the vertex of a circular sector is the ratio of the length of its arc to its radius, the magnitude of a solid angle in steradians is the ratio of the area covered on a sphere by an object to the square of the radius of the sphere.
The solid angle of an object that is very far away is roughly proportional to the ratio of area to squared distance.
The solid angle subtended at the center of a cube by one of its faces is one-sixth of that, or 2π/3 sr.
, the position vector of an infinitesimal area of surface dS with respect to point P, and where
Thus one can approximate the solid angle subtended by a small facet having flat surface area dS, orientation
The above is found by computing the following double integral using the unit surface element in spherical coordinates:
This is also the solid angle of the part of the celestial sphere that an astronomical observer positioned at latitude θ can see as the Earth rotates.
The solid angle subtended by a segment of a spherical cap cut by a plane at angle γ from the cone's axis and passing through the cone's apex can be calculated by the formula[4]
Let OABC be the vertices of a tetrahedron with an origin at O subtended by the triangular face ABC where
be the dihedral angle between the planes that contain the tetrahedral faces OAC and OBC and define
This follows from the theory of spherical excess and it leads to the fact that there is an analogous theorem to the theorem that "The sum of internal angles of a planar triangle is equal to π", for the sum of the four internal solid angles of a tetrahedron as follows:
ranges over all six of the dihedral angles between any two planes that contain the tetrahedral faces OAB, OAC, OBC and ABC.
Another interesting formula involves expressing the vertices as vectors in 3 dimensional space.
One source of potential errors is that the scalar triple product can be negative if a, b, c have the wrong winding.
Computing the absolute value is a sufficient solution since no other portion of the equation depends on the winding.
The other pitfall arises when the scalar triple product is positive but the divisor is negative.
If both the side lengths (α and β) of the base of the pyramid and the distance (d) from the center of the base rectangle to the apex of the pyramid (the center of the sphere) are known, then the above equation can be manipulated to give
The solid angle of an arbitrary pyramid with an n-sided base defined by the sequence of unit vectors representing edges {s1, s2}, ... sn can be efficiently computed by:[4]
The complex products add the phase associated with each vertex angle of the polygon.
Also, the running product of complex phases must scaled occasionally to avoid underflow in the limit of nearly parallel segments.
where φN and φS are north and south lines of latitude (measured from the equator in radians with angle increasing northward), and θE and θW are east and west lines of longitude (where the angle in radians increases eastward).
[10] Mathematically, this represents an arc of angle ϕN − ϕS swept around a sphere by θE − θW radians.
All four sides of a rectangular pyramid intersect the sphere's surface in great circle arcs.
The solid angle subtended by the complete (d − 1)-dimensional spherical surface of the unit sphere in d-dimensional Euclidean space can be defined in any number of dimensions d. One often needs this solid angle factor in calculations with spherical symmetry.
It also gives the slightly less obvious 2 for the 1D case, in which the origin-centered 1D "sphere" is the interval [−r, r] and this is bounded by two limiting points.
The counterpart to the vector formula in arbitrary dimension was derived by Aomoto[12][13] and independently by Ribando.
defining the angle, let V denote the matrix formed by combining them so the ith column is