Frequency compensation
It usually has two primary goals: To avoid the unintentional creation of positive feedback, which will cause the amplifier to oscillate, and to control overshoot and ringing in the amplifier's step response.
Most amplifiers use negative feedback to trade gain for other desirable properties, such as decreased distortion, improved noise reduction or increased invariance to variation of parameters such as temperature.
Ideally, the phase characteristic of an amplifier's frequency response would be linear; however, device limitations make this goal physically unattainable.
Another goal of frequency compensation is to control the step response of an amplifier circuit as shown in Figure 1.
However, the output is not ideal because of the frequency response of the amplifier, and ringing occurs.
Several figures of merit to describe the adequacy of step response are in common use.
These various measures of the step response usually conflict with one another, requiring optimization methods.
Frequency compensation is implemented to optimize step response, one method being pole splitting.A Because operational amplifiers are so ubiquitous and are designed to be used with feedback, the following discussion will be limited to frequency compensation of these devices.
It should be expected that the outputs of even the simplest operational amplifiers will have at least two poles.
This is because (a) the feedback is implemented through the use of an inverting input that adds an additional −180° to the output phase making the total phase shift −360° and (b) the gain is sufficient to induce oscillation.
A more precise statement of this is the following: An operational amplifier will oscillate at the frequency at which its open loop gain equals its closed loop gain if, at that frequency, Frequency compensation is implemented by modifying the gain and phase characteristics of the amplifier's open loop output or of its feedback network, or both, in such a way as to avoid the conditions leading to oscillation.
It is an external compensation technique and is used for relatively low closed loop gain.
The result is that the difference between the open loop output phase and the phase response of a feedback network having no reactive elements never falls below −180° while the amplifier has a gain of one or more, ensuring stability.
The result is a phase margin of ≈ 45°, depending on the proximity of still higher poles.
[b] This margin is sufficient to prevent oscillation in the most commonly used feedback configurations.
In addition, dominant-pole compensation allows control of overshoot and ringing in the amplifier step response, which can be a more demanding requirement than the simple need for stability.
be the uncompensated transfer function of op amp in open-loop configuration which is given by:
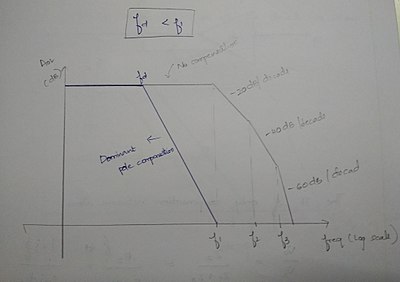
Thus, for compensation, introduce a dominant pole by adding an RC network in series with the Op-Amp as shown in the figure.
Hence, the frequency response of a dominant pole compensated open loop Op-Amp circuit shows uniform gain roll off from fd and becomes 0 at f1 as shown in the graph.
Though simple and effective, this kind of conservative dominant pole compensation has two drawbacks: Often, the implementation of dominant-pole compensation results in the phenomenon of Pole splitting.
They are often used to compensate high gain, wide bandwidth amplifiers.