Servomechanism
It often includes a servomotor, and uses closed-loop control to reduce steady-state error and improve dynamic response.
[2] In displacement-controlled applications, it usually includes a built-in encoder or other position feedback mechanism to ensure the output is achieving the desired effect.
[1] The term correctly applies only to systems where the feedback or error-correction signals help control mechanical position, speed, attitude or any other measurable variables.
They operate on the principle of negative feedback, where the control input is compared to the actual position of the mechanical system as measured by some type of transducer at the output.
The steam engine uses mechanical governors; another early application was to govern the speed of water wheels.
Stepper motors have inherent angular positioning, owing to their construction, and this is generally used in an open-loop manner without feedback.
[6] RC servos are used to provide actuation for various mechanical systems such as the steering of a car, the control surfaces on a plane, or the rudder of a boat.
A standard RC receiver (or a microcontroller) sends pulse-width modulation (PWM) signals to the servo.
James Watt's steam engine governor is generally considered the first powered feedback system.
[7] The telemotor was invented around 1872 by Andrew Betts Brown, allowing elaborate mechanisms between the control room and the engine to be greatly simplified.
The Ragonnet power reverse mechanism was a general purpose air or steam-powered servo amplifier for linear motion patented in 1909.
The origin of the word is believed to come from the French "Le Servomoteur" or the slavemotor, first used by J. J. L. Farcot in 1868 to describe hydraulic and steam engines for use in ship steering.


The grey/green cylinder is the brush-type DC motor . The black section at the bottom contains the planetary reduction gear , and the black object on top of the motor is the optical rotary encoder for position feedback.
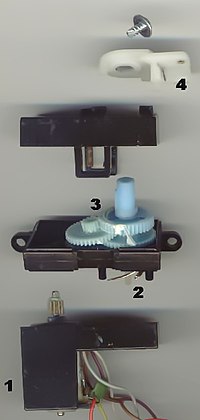
1. electric motor
2. position feedback potentiometer
3. reduction gear
4. actuator arm
